
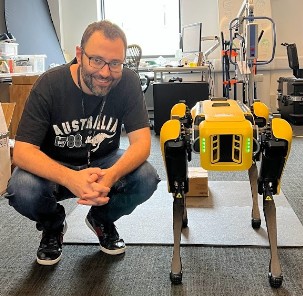
We are pleased to have AI Robotics expert, Dr Dimitrios Kanoulas, Associate Professor, Deptartment of Computer Science, University College London (UCL) lecture this year. Presentation by Dr Valerio Modugno and Jianhao Jiao.
Dr Kanoulas works in the field of perception and learning for robotics, and developing new estimation and planning algorithms for articulated robots that locomote and manipulate in uncertain natural environment. He is focused on developing new theoretical results on sensing, real-time map building, and self/environment modeling of surface contact areas which include statistical models of uncertainty, for the purpose of articulated locomotion on very uneven 3D terrain, using SLAM and perception systems, as well as manipulation methods for structured and free-formed objects.
His research aims to apply perception and learning in robotics, with a focus in legged ones. Self-supervised, deep, reinforcement, and imitation, learning, as well as sim2real and robot teleoperation, belong to his recently explored areas of interest and are connected to the ongoing funded projects. Experimental justification of theory on real robots plays a central role in his research and academic philosophy. To date, he has developed perception and learning techniques on: a mini-bipedal (UCL RPBP), a half-size (IIT COMAN), and two full-size (IIT WALK-MAN, IIT COMAN+) humanoid robots, as well as on several (IIT CENTAURO, UCL A1, UCL Go1, UCL B1/Z1, UCL ANYmal, UCL Spot, UCL Jueying) quadrupedal robots and three mobile manipulators (IIT MOCA, UCL Summit-XLS, UCL AgileX), facing all the big challenges of real-world scenarios.
His work has been published in prestigious international conferences and journals including RAS, AuRo, RAM, Frontiers, Springer STAR, JFR, IJHR, CoRL, ICRA, IROS, Humanoids, ICARCV, and ISER, for which I have also organized several workshops related to robot perception and locomotion. He has received the Best Interactive Paper Award at Humanoids 2017, Best Student Paper Finalist at ICARCV 2018, the Marie Sklodowska-Curie Actions Seal of Excellence 2018, the Best Associate Editor Award at ICRA 2022, and Outstanding Paper Finalist at ICML (WFVML workshop) 2023. He has a large set of collaborations with several researchers on robotic SLAM, locomotion, and manipulation, such as UCL-MechEng (UK), IIT (Italy), FORTH (Greece), UoI (Greece), DLR (Germany), LAAS-CNRS (France), Univ. of Osaka (Japan), Univ. of Leeds and Oxford (UK), to name a few.
Valerio Modugno received the Ph.D. degree from Sapienza University of Rome in 2017. During his Ph.D. he was a visiting Researcher at The Technical University of Darmstadt in 2014 and at the INRIA Grand-Est Nancy in 2015. He is currently a Senior Research Fellow at the RPL laboratory at University College London (UCL). Before joining UCL in 2022, he was a Post Doctoral Researcher for four years at Sapienza University of Rome under Prof. Giuseppe Oriolo. His research interests comprise Humanoid Whole-Body Control, Optimal Control, teleoperation for legged robots, Reinforcement Learning, Black-Box Optimization, and safety for control and learning strategies. He won a starting research grant from the Sapienza University of Rome in 2021
Jianhao Jiao received the Ph.D. degree from the Hong Kong University of Science and Technology in 2021, and was the postdoc researcher at the same university from 2022 to 2023. He is currently a Senior Research Fellow at the RPL laboratory at University College London (UCL). His research interests comprise sensor fusion, mobile robot navigation, and deep learning. He is the Associate Editor of IROS 2024.
 Professor John O’Keefe
Professor John O’Keefe Professor Joy Hirsch
Professor Joy Hirsch Professor Dame Ijeoma Uchegbu
Professor Dame Ijeoma Uchegbu Professor Tolullah Oni
Professor Tolullah Oni Professor John Morton
Professor John Morton Professor Brian Bigger
Professor Brian Bigger Professor Claire Carmalt
Professor Claire Carmalt Dr Mark McCaughrean
Dr Mark McCaughrean Dr Anna Ploszajski
Dr Anna Ploszajski Dr. Jason Nurse
Dr. Jason Nurse Professor Clare Elwell
Professor Clare Elwell